
Unscented Kalman Filter
Overview
This project was done as a homework assignment for CS/ME 469 ML and AI for Robotics at Northwestern. The task was to implement the Unscented Kalman Filter (UKF) from scratch for a mobile robot to localize itself. The UKF was tested on a real robot dataset, and results from filtering were compared to ground truth robot positions measured using a system fo cameras. The datasets used for the project can be found here. Code is not provided since this is a regular homework assignment.
Models
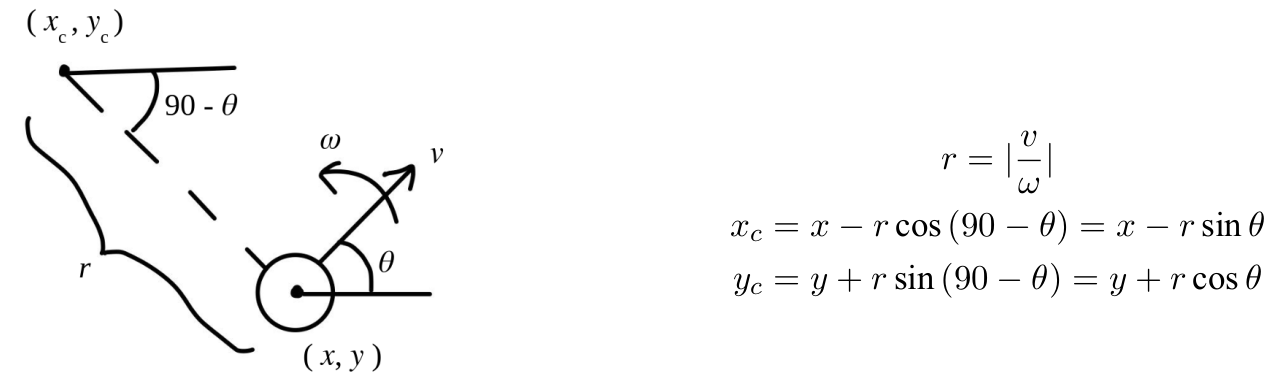
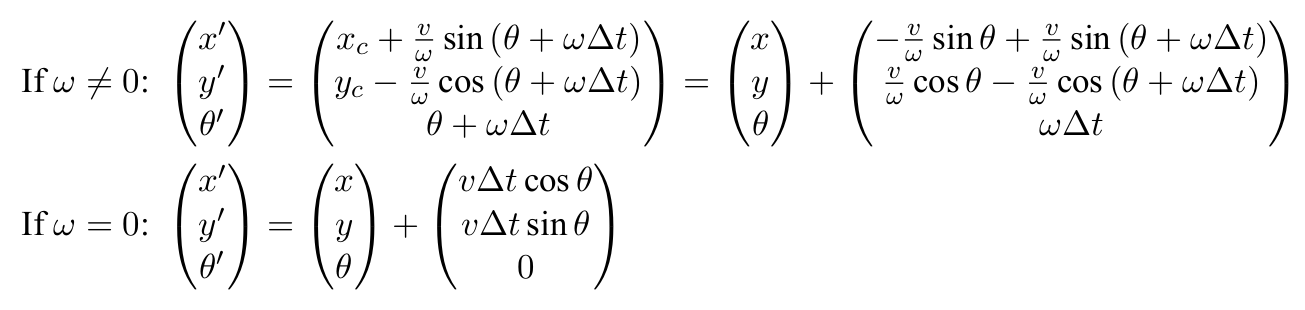
The motion model for the robot was designed based on differential drive kinematics [1] and used as the state transition model for the UKF.
The sensor model for the robot was designed based on the range-bearing sensor model and used as the measurement model for the UKF.

UKF Algorithm
The UKF algorithm is a Bayes filter using a moments parametrization (mean and covariance). It assumes that the belief state can be represented by a gaussian (i.e. the initial belief is normally distributed). Like the Extended Kalman Filter (EKF), it can be used for systems with nonlinear dynamics (g) and measurement models (h). It differs from the EKF in how it linearizes the transformation of the gaussian through nonlinear functions. The UKF employs the unscented transform, explicitly sampling sigma points from the gaussian and passing each of them through g and h. These sigma points are sampled at the mean and symmetrically about the mean for each of the state variables, resulting in 2n + 1 sigma points, where n is the dimensionality of the state. Sampled sigma points are then passed through the nonlinear state-transition function g along with the control command at that each timestep the set of transformed sigma points.
More on the UKF can be found at [1] and [2].
Results
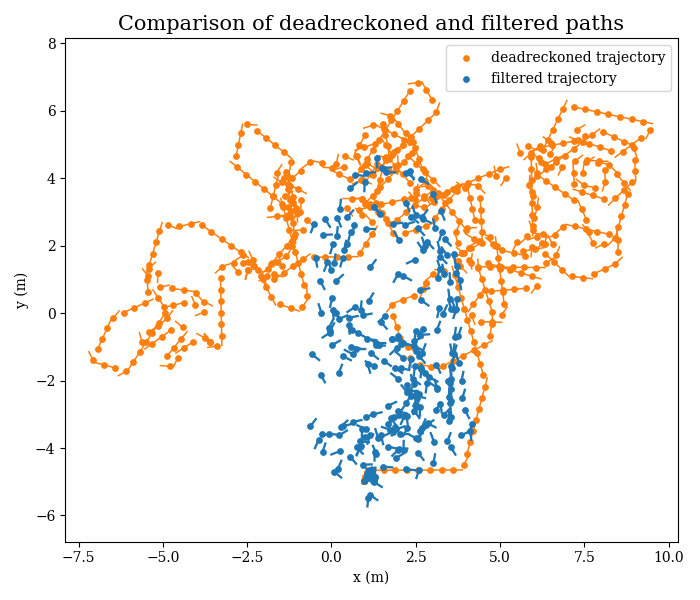
Using only the motion model, robot motion was forward simulated and compared against the ground truth:
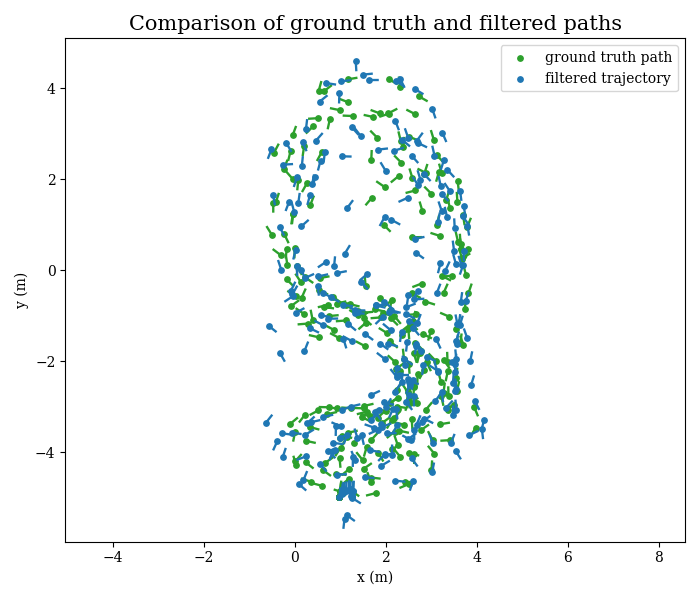
When filtering is applied using the UKF, the simulated robot motion was much closer to the ground truth:
References
[1] Thrun, S., Burgard, W., Fox, D. & Arkin, R. (2005). Probabilistic robotics. MIT Press.
[2] Terejanu, G. A. (2011). Unscented kalman filter tutorial. University at Buffalo, Buffalo.