Gaussian Mixture Regression for robot learning
Overview
This project was done for the robot learning assignment of CS/ME 469 ML and AI for Robotics at Northwestern. For this project, I chose to implement a GMM-GMR pipeline in python to learn a model for the inverse kinemaitcs of a differential drive robot. The datasets used for the project can be found here. Code is not provided since this is a homework assignment.
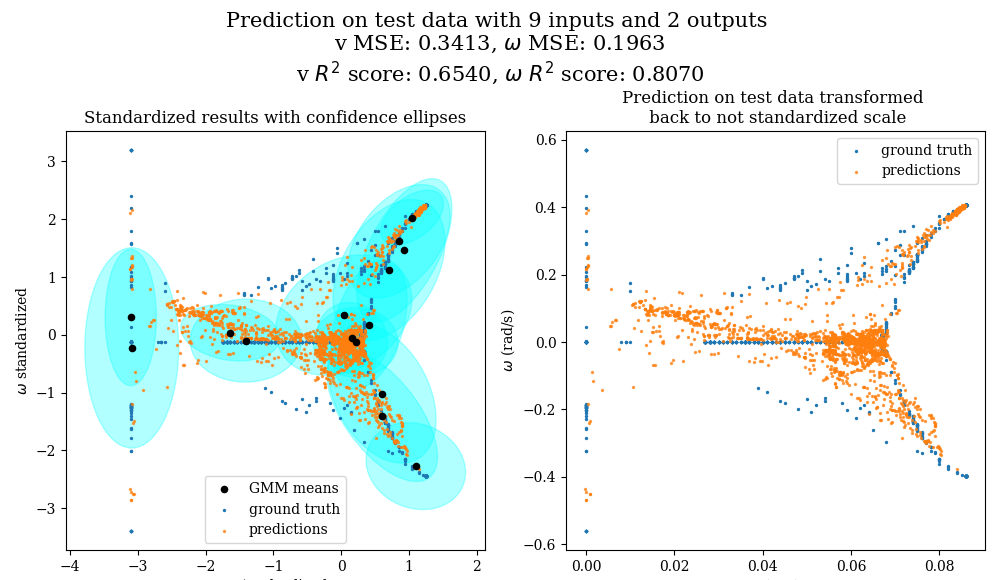
Some results from the model trained using this implementation: