A* Search for robot planning and navigation
A* Search in Python for wheeled mobile robot path planning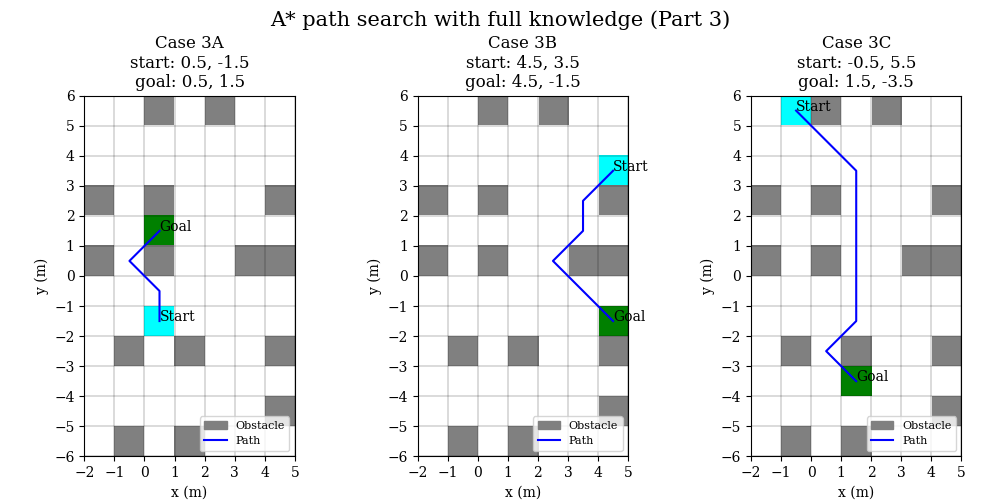

A* Search in Python for wheeled mobile robot path planning
Virtual tasks for eye gaze characterization, and open-source ROS wrapper for Tobii Pro Glasses 3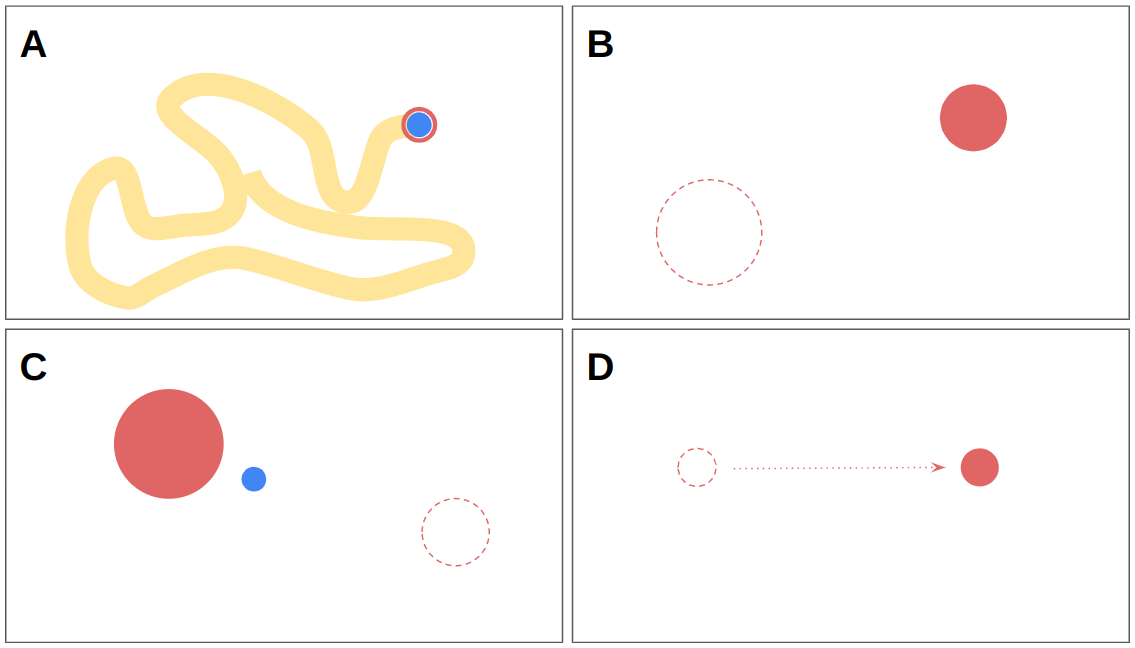
Gaussian Mixture Regression (GMM-GMR) in Python to learn an inverse kinematics model of a robot based on a given dataset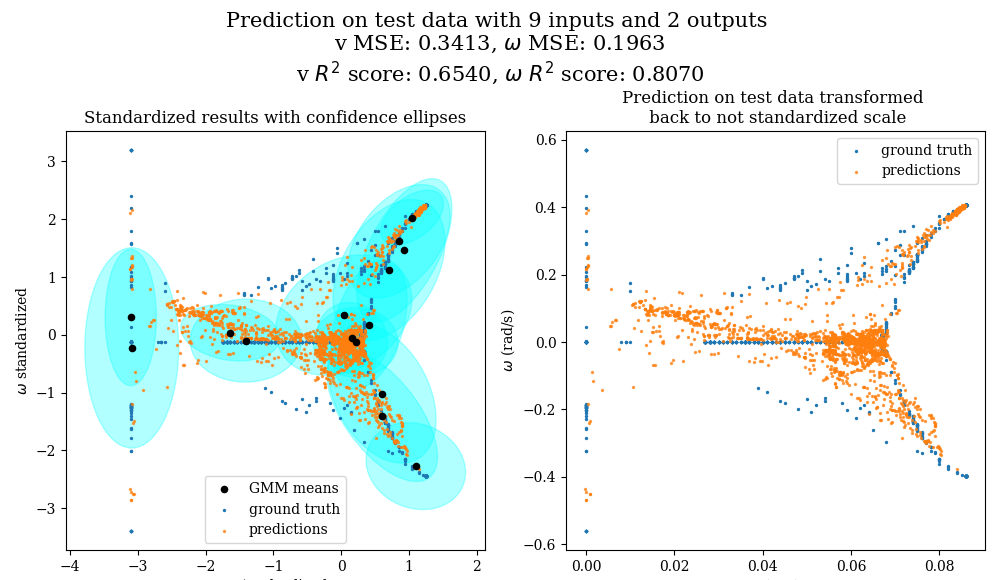
ROS implementation of SLAM using an extended kalman filter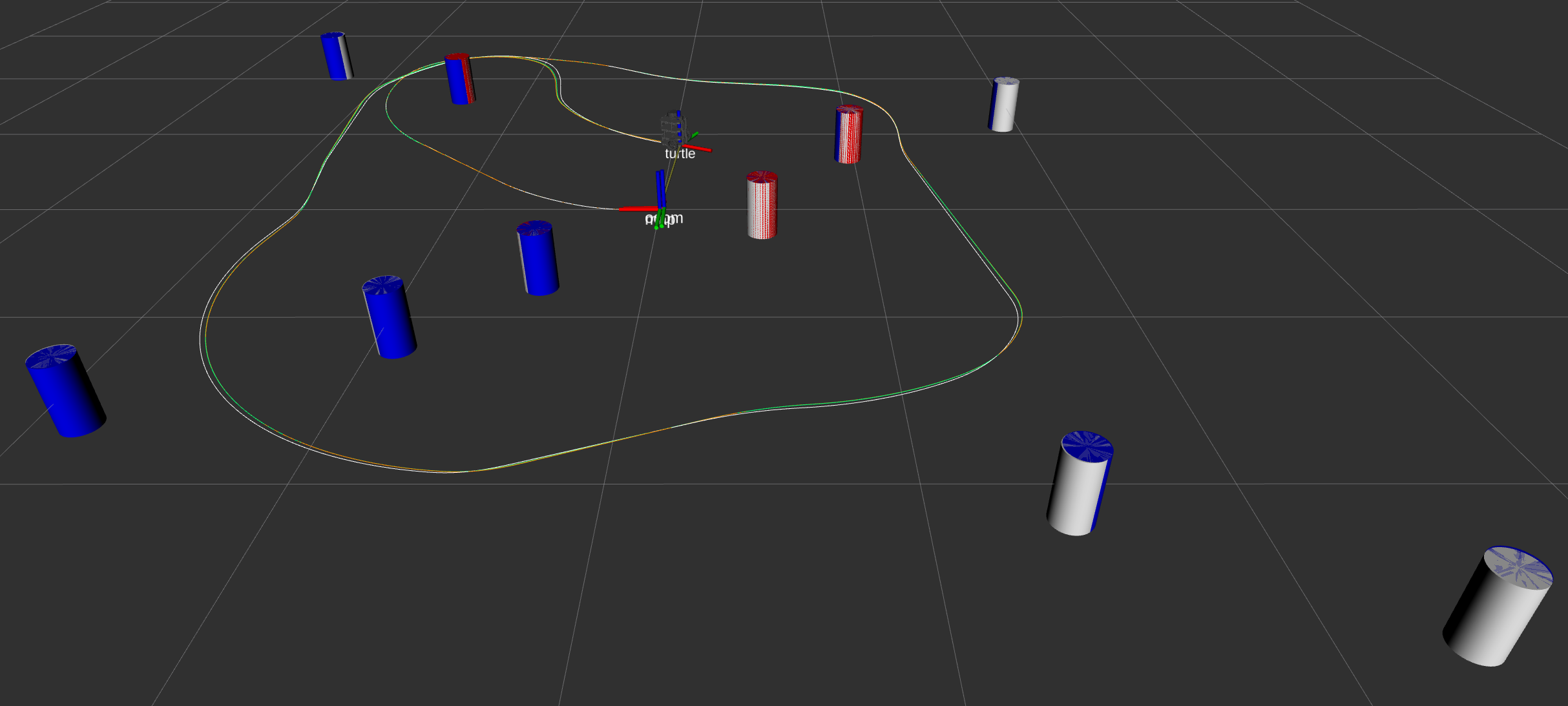
Implementation of SQP in Python (from scratch)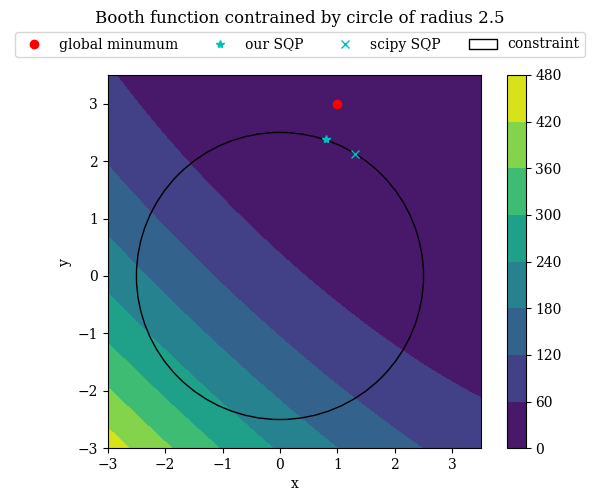
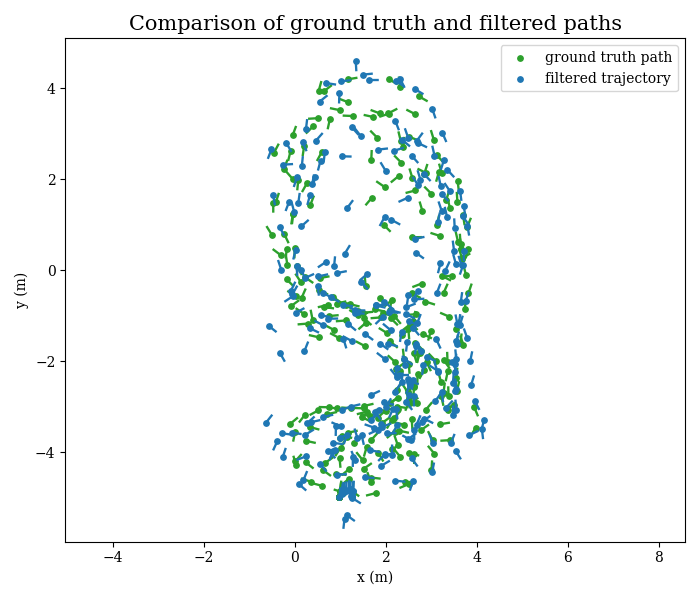
Unscented Kalman Filter for localization of a wheeled mobile robot