A* Search for robot planning and navigation
A* Search in Python for wheeled mobile robot path planning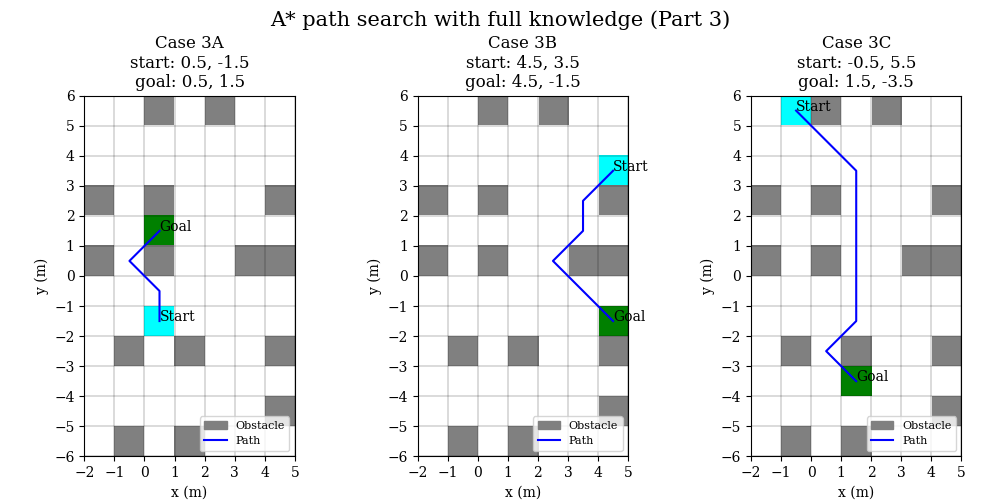

A* Search in Python for wheeled mobile robot path planning
Virtual tasks for eye gaze characterization, and open-source ROS wrapper for Tobii Pro Glasses 3
Gaussian Mixture Regression (GMM-GMR) in Python to learn an inverse kinematics model of a robot based on a given dataset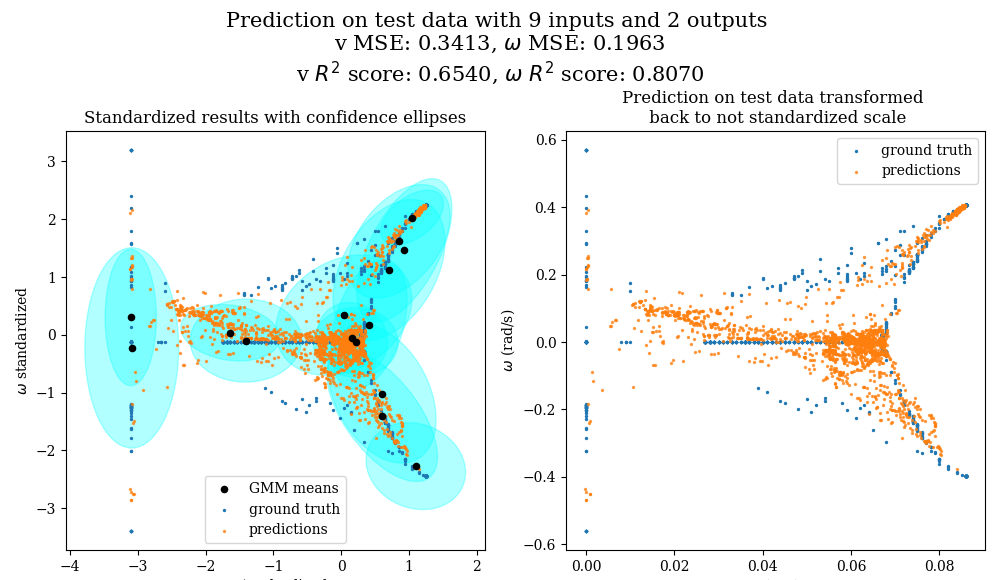
ROS implementation of SLAM using an extended kalman filter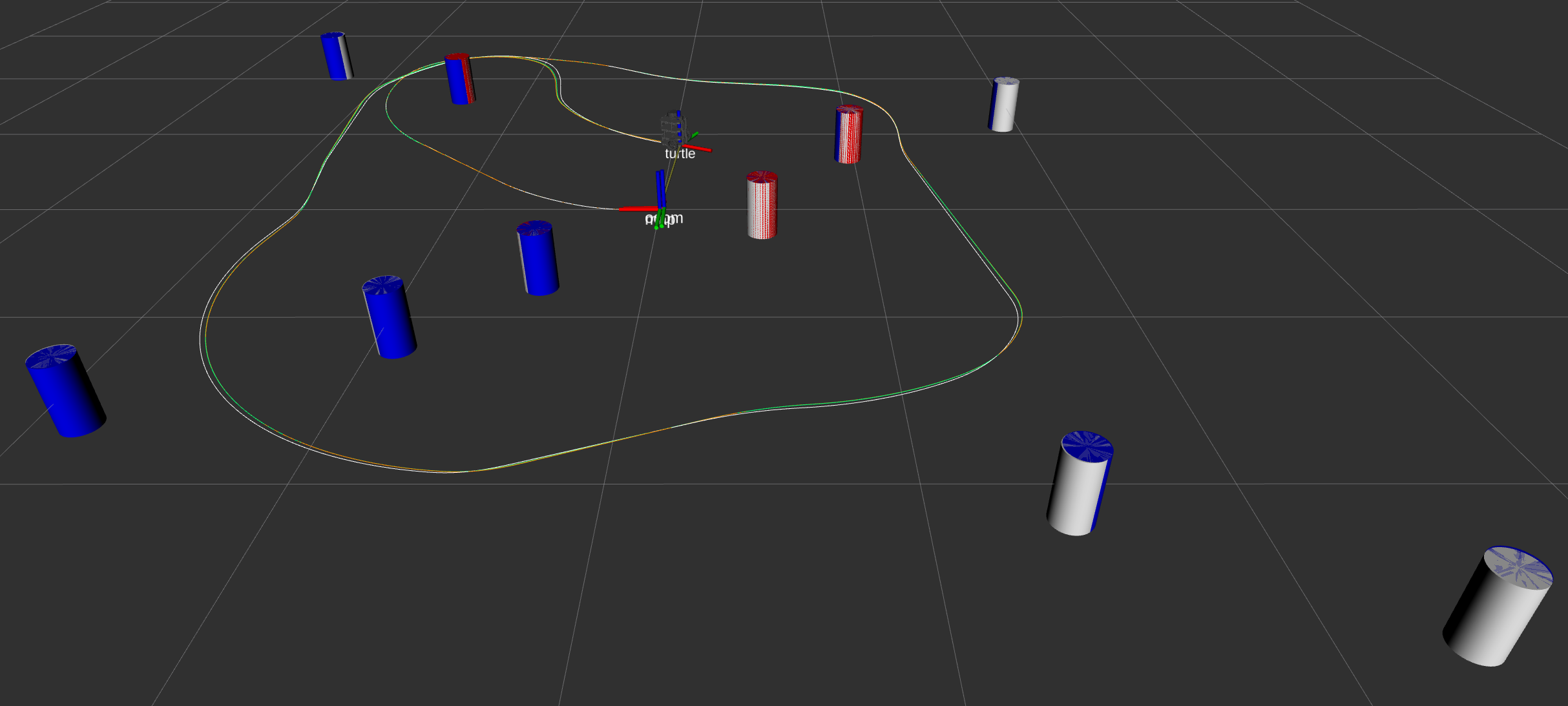
Implementation of SQP in Python (from scratch)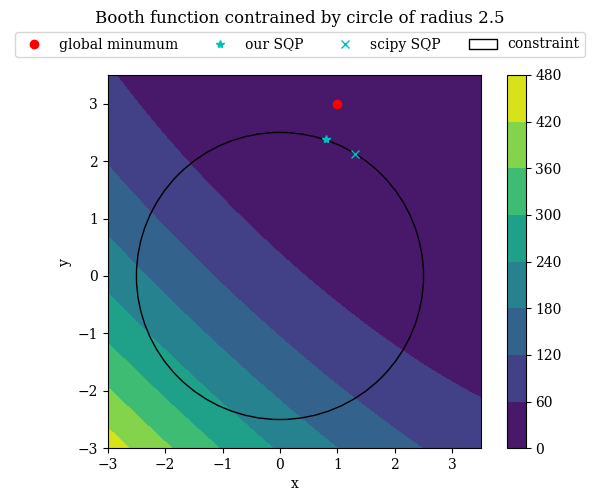
Unscented Kalman Filter for localization of a wheeled mobile robot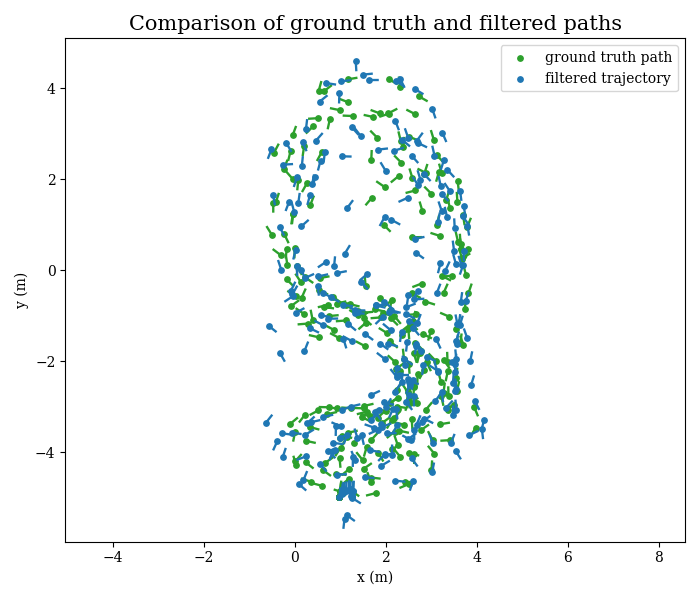
Published in International Conference on Rehabilitation Robotics 2022, Rotterdam, 2022
Creating a custom interface to assistive device control mapping based on the design of a user’s bias profile
Recommended citation: Thompson, A.*, Loke, L. YC.*, & Argall, B. (2022, July). Control interface remapping for bias-aware assistive teleoperation. In 2022 International Conference on Rehabilitation Robotics (ICORR) (pp. 1-6). IEEE.
Published in International Conference on Rehabilitation Robotics 2023, Singapore, 2023
Open source data gathering and assessment tasks for individualized characterization of eye gaze interface use.
Recommended citation: Loke, L. YC., Barsoum, D. R., Murphey, T. D., & Argall, B. D. (2023, September). Characterizing eye gaze for assistive device control. In 2023 International Conference on Rehabilitation Robotics (ICORR) (pp. 1-6). IEEE.
Published in Wearable Technologies, Volume 6, Cambridge University Press, 2025
Open source data gathering and assessment tasks for individualized characterization of eye gaze interface use, and eyegaze for mental workload assessment.
Recommended citation: Loke, L. YC., Barsoum, D. R., Murphey, T. D., & Argall, B. D. (2025). Characterizing eye gaze and mental workload for assistive device control. Wearable Technologies, 6, e13.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.